
Điều khiển step motor PLC Mitsubishi là gì? Hướng dẫn lập trình plc mitsubishi điều khiển step motor tự động đầy đủ nhất, đọc chuẩn từ A-Z.
Trong lĩnh vực tự động hóa công nghiệp, việc điều khiển các thiết bị máy móc với độ chính xác cao là một yêu cầu quan trọng để đảm bảo hiệu suất hoạt động ổn định và tiết kiệm thời gian.
Lập Trình PLC Mitsubishi Điều Khiển Step Motor
Một trong những thiết bị được sử dụng rộng rãi trong các hệ thống tự động hóa là step motor (động cơ bước), loại động cơ có khả năng di chuyển theo bước nhỏ và chính xác.
Để điều khiển động cơ bước này một cách hiệu quả, việc sử dụng PLC Mitsubishi (Programmable Logic Controller) là một giải pháp tối ưu.
PLC Mitsubishi được biết đến với khả năng xử lý nhanh chóng, độ tin cậy cao và dễ dàng lập trình.
Chúng ta sẽ cùng tìm hiểu về cách lập trình PLC Mitsubishi để điều khiển step motor, từ các nguyên lý cơ bản đến các ứng dụng thực tiễn trong ngành công nghiệp, giúp tối ưu hóa quy trình sản xuất và đạt được hiệu quả cao nhất.
Điều khiển step motor (động cơ bước) bằng PLC Mitsubishi là quá trình sử dụng bộ điều khiển logic lập trình (PLC) của Mitsubishi để điều khiển chuyển động của động cơ bước. PLC Mitsubishi thông qua các tín hiệu xung điều khiển gửi đến động cơ bước, giúp động cơ quay một góc nhất định mỗi lần nhận được xung.
Điều khiển step motor PLC Mitsubishi là gì?
Điều này đảm bảo sự di chuyển chính xác và linh hoạt trong các hệ thống tự động hóa.
Điều khiển step motor bằng PLC Mitsubishi có vai trò rất quan trọng trong các hệ thống tự động hóa, giúp đảm bảo độ chính xác và hiệu suất cao trong quá trình vận hành các thiết bị cơ khí và điện tử phức tạp, tạo ra sự linh hoạt trong sản xuất và hoạt động của các ứng dụng công nghiệp.
Sự quan trọng của việc sử dụng PLC Mitsubishi trong điều khiển động cơ bước đến từ khả năng tối ưu hóa quy trình sản xuất, giảm thiểu sai sót và đảm bảo hiệu suất tối đa trong mọi ứng dụng, từ máy CNC đến robot tự động và các thiết bị đóng gói.

Ưu Điểm của Điều Khiển Step Motor PLC Mitsubishi
Điều khiển step motor bằng PLC Mitsubishi mang lại nhiều ưu điểm vượt trội, giúp tối ưu hóa các hệ thống tự động hóa với độ chính xác cao, chi phí vận hành thấp và khả năng tùy chỉnh linh hoạt để phù hợp với nhu cầu đa dạng của các ứng dụng công nghiệp.
Ưu điểm của việc sử dụng PLC Mitsubishi trong điều khiển động cơ bước là khả năng đáp ứng linh hoạt với các yêu cầu kỹ thuật cao trong các hệ thống tự động hóa, từ điều khiển tốc độ, gia tốc đến giảm tốc, đồng thời đảm bảo sự ổn định và tiết kiệm chi phí cho các ứng dụng dài hạn.
Ứng Dụng của Điều Khiển Step Motor PLC Mitsubishi
Việc điều khiển step motor thông qua PLC Mitsubishi mang lại sự linh hoạt và chính xác trong nhiều lĩnh vực công nghiệp, giúp tăng hiệu suất và giảm thiểu sai sót trong các quy trình tự động hóa phức tạp.
Ứng dụng điều khiển động cơ bước bằng PLC Mitsubishi phổ biến trong các hệ thống đòi hỏi độ chính xác và điều khiển vị trí tuyệt đối, chẳng hạn như máy CNC, robot, máy in 3D, và các dây chuyền sản xuất tự động, mang lại hiệu quả cao trong quá trình sản xuất và giảm thiểu sai sót.
Điều khiển step motor bằng PLC Mitsubishi là giải pháp hiệu quả và linh hoạt trong các ứng dụng tự động hóa, cung cấp độ chính xác cao, khả năng lập trình linh hoạt và độ tin cậy bền bỉ.
Với những ưu điểm này, PLC Mitsubishi đã trở thành công cụ phổ biến trong việc điều khiển động cơ bước, ứng dụng rộng rãi trong các ngành công nghiệp như máy CNC, robot tự động, thiết bị đóng gói, và nhiều ứng dụng tự động hóa khác.
Lập Trình PLC Mitsubishi Điều Khiển Step Motor
Để điều khiển động cơ bước (step motor) bằng PLC Mitsubishi, ta cần lập trình PLC sao cho nó có thể gửi tín hiệu xung (pulse) điều khiển đến động cơ.
Mỗi xung sẽ làm động cơ bước quay một góc cố định, điều này được thực hiện thông qua các đầu ra của PLC để kích hoạt các mạch điều khiển động cơ.
Các bước lập trình cơ bản dưới đây giúp bạn có thể lập trình và điều khiển động cơ bước một cách hiệu quả.
Lập trình plc mitsubishi điều khiển step motor
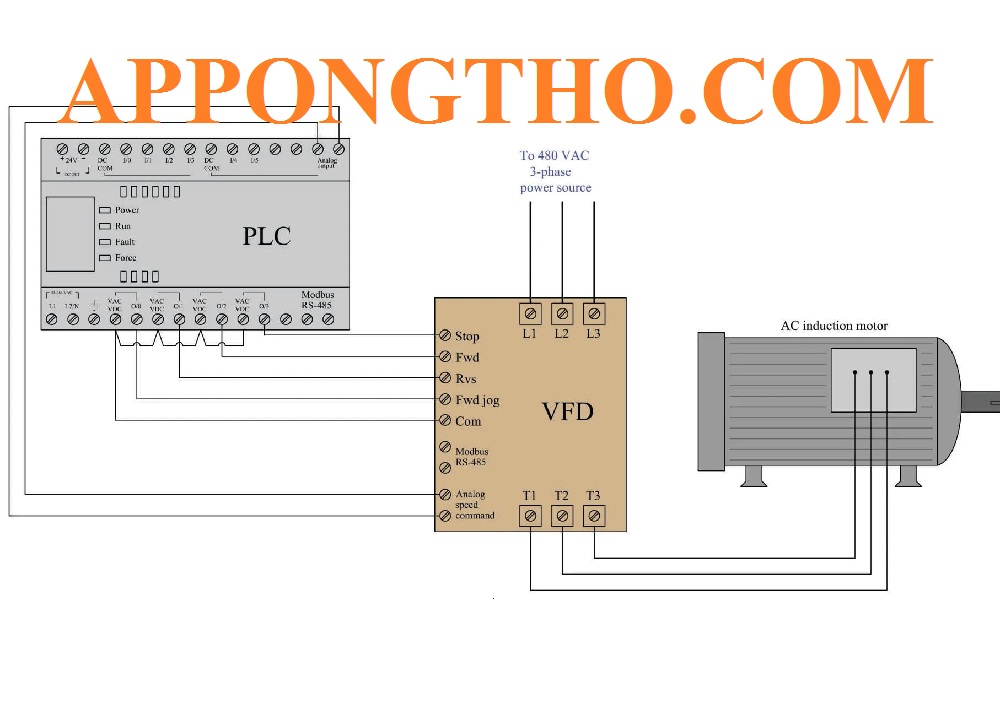
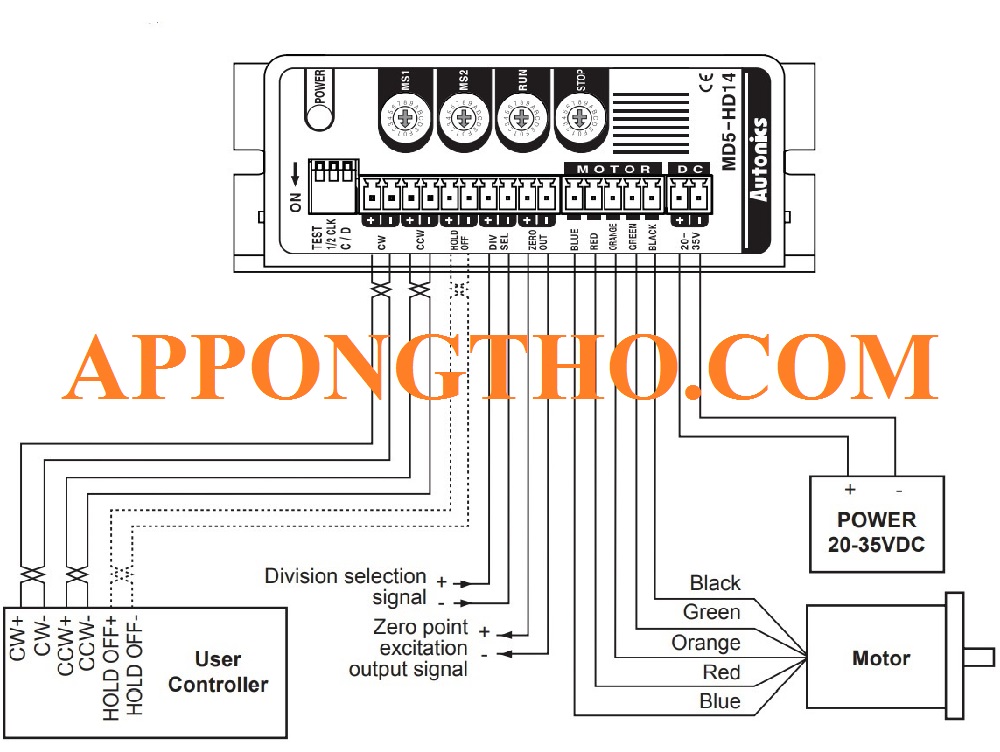
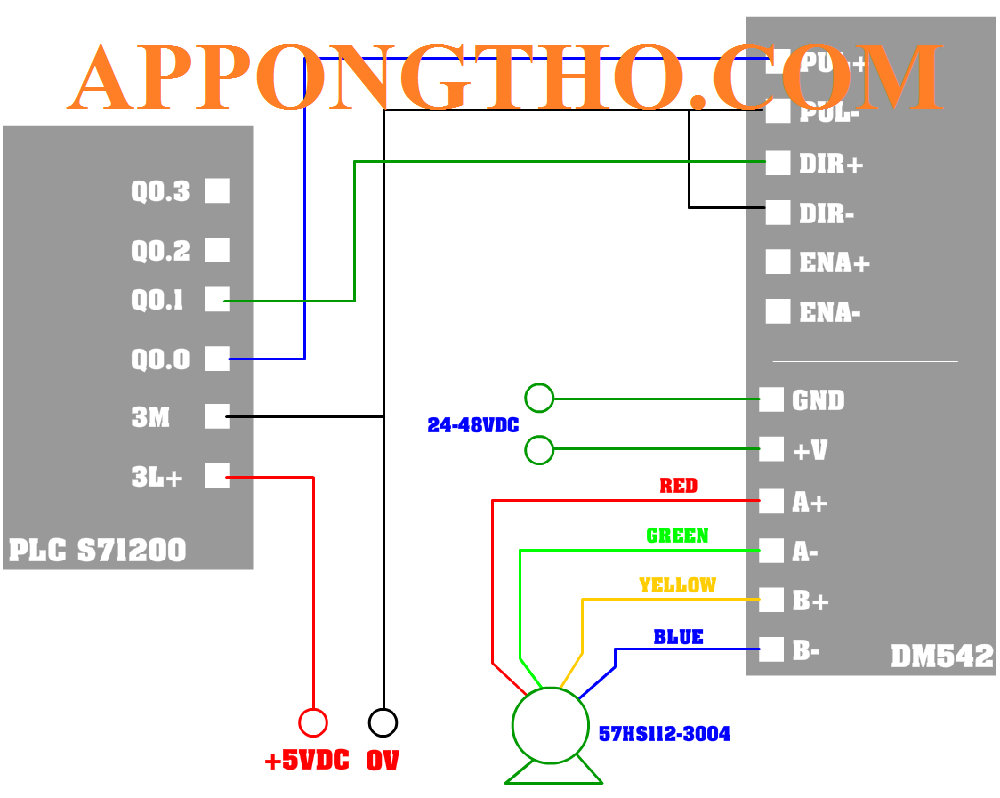
Trước khi lập trình, cần chuẩn bị các thiết bị phần cứng như PLC Mitsubishi, động cơ bước, và driver động cơ để thiết lập kết nối đúng đắn, đảm bảo hoạt động ổn định.
Cấu hình phần cứng chính xác là yếu tố quan trọng để PLC có thể điều khiển động cơ bước hiệu quả mà không gặp phải vấn đề gì trong suốt quá trình hoạt động.
Ví dụ: Kết nối PLC Mitsubishi với driver thông qua đầu ra xung (X0) để điều khiển động cơ bước.
Phần cứng phải được chuẩn bị và kiểm tra cẩn thận để đảm bảo không xảy ra sự cố khi điều khiển động cơ bước bằng PLC Mitsubishi.
Trong bước này, bạn cần cấu hình các đầu ra của PLC để phát tín hiệu xung điều khiển động cơ bước, đảm bảo mỗi xung phát ra sẽ làm động cơ quay một góc cụ thể.
Việc cấu hình đầu ra xung chính xác là yếu tố then chốt giúp điều khiển chính xác chuyển động của động cơ bước, từ đó đảm bảo hiệu suất hoạt động của hệ thống.
Ví dụ: Cấu hình đầu ra X0 để phát tín hiệu xung với tần số 2000ms mỗi xung.
Việc cấu hình đầu ra xung đúng cách giúp điều khiển động cơ bước với tốc độ và chính xác như mong muốn, đảm bảo sự ổn định cho hệ thống.
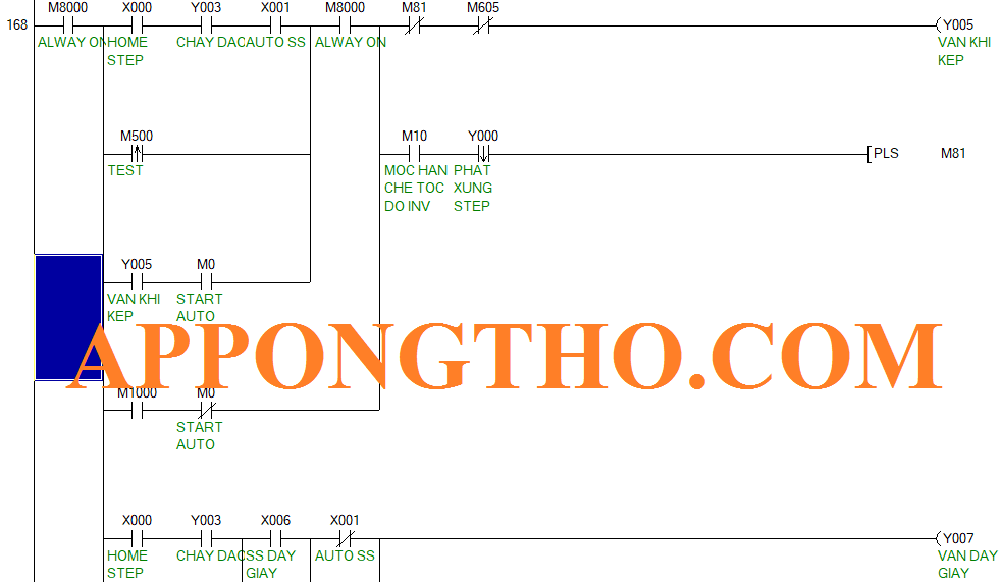
Bước 3: Lập Trình Tạo Xung Điều Khiển
Lập trình PLC để tạo các tín hiệu xung, điều khiển động cơ bước quay.
Mỗi xung sẽ làm động cơ quay một góc nhỏ, giúp thực hiện chuyển động chính xác.
Lệnh PULSE trong PLC sẽ giúp tạo các xung điều khiển động cơ, từ đó tạo ra chuyển động chính xác cho động cơ bước, phục vụ cho các ứng dụng yêu cầu độ chính xác cao.
Ví dụ: Lập trình lệnh PULSE K2000 để phát ra một tín hiệu xung mỗi 2000ms.
Lệnh PULSE trong PLC giúp tạo ra xung điều khiển chính xác cho động cơ bước, phục vụ cho các ứng dụng tự động hóa chính xác.
Để điều khiển hướng quay của động cơ bước, ta cần lập trình để thay đổi tín hiệu điều khiển giữa chiều quay thuận và ngược.
Điều khiển hướng quay của động cơ là một phần quan trọng để động cơ thực hiện được các chuyển động chính xác trong ứng dụng.
Ví dụ: Sử dụng tín hiệu M0 và M1 để điều khiển hướng quay động cơ bước.
Điều khiển hướng quay chính xác giúp động cơ thực hiện các chuyển động linh hoạt và chính xác, phù hợp với yêu cầu ứng dụng.
Tốc độ quay của động cơ bước cần được điều chỉnh sao cho phù hợp với yêu cầu của từng ứng dụng, đảm bảo sự mượt mà trong quá trình hoạt động.
Điều chỉnh tốc độ quay giúp động cơ hoạt động một cách mượt mà và ổn định, tránh tình trạng động cơ quay quá nhanh hoặc quá chậm.
Ví dụ: Cài đặt tốc độ quay động cơ bằng lệnh TON với thời gian trì hoãn là 100ms giữa các xung.
Điều chỉnh tốc độ quay là bước quan trọng để đạt được hiệu suất tối ưu trong quá trình điều khiển động cơ bước.
Bước 6: Thêm Gia Tốc và Giảm Tốc
Trong các ứng dụng động cơ bước, việc điều chỉnh gia tốc và giảm tốc là cần thiết để tạo ra chuyển động mượt mà và tránh va chạm hay rung động.
Gia tốc và giảm tốc giúp động cơ đạt được tốc độ ổn định mà không gây hư hại cho các cơ cấu khác trong hệ thống.
Ví dụ: Cài đặt gia tốc từ 0 lên 1000rpm trong 2 giây.
Gia tốc và giảm tốc giúp động cơ hoạt động mượt mà, ổn định, và an toàn trong suốt quá trình.
Sau khi lập trình, cần kiểm tra lại toàn bộ hệ thống để phát hiện và khắc phục các lỗi trong quá trình vận hành động cơ bước.
Lỗi có thể phát sinh từ các vấn đề như tín hiệu xung không ổn định, phần cứng không tương thích hoặc lỗi phần mềm.
Việc kiểm tra và khắc phục giúp tăng độ bền và độ chính xác của hệ thống.
Ví dụ: Kiểm tra xem động cơ có quay ngược chiều khi lỗi xảy ra và điều chỉnh lại tín hiệu điều khiển.
Việc kiểm tra và điều chỉnh lỗi giúp đảm bảo rằng hệ thống sẽ vận hành một cách ổn định và hiệu quả.
Tối ưu hóa chương trình điều khiển để đảm bảo hiệu suất hoạt động của hệ thống động cơ bước, giúp tiết kiệm thời gian và năng lượng.
Tối ưu hóa chương trình không chỉ giúp hệ thống hoạt động nhanh chóng hơn mà còn giúp tiết kiệm năng lượng và tài nguyên.
Ví dụ: Tối ưu hóa chương trình để động cơ có thể quay một cách nhanh chóng mà không giảm hiệu suất.
Tối ưu hóa chương trình giúp hệ thống hoạt động nhanh chóng, hiệu quả, đồng thời giảm tiêu thụ năng lượng và chi phí.
Bước 9: Kiểm Tra và Đánh Giá Kết Quả
Cuối cùng, kiểm tra toàn bộ hệ thống và đánh giá kết quả để đảm bảo động cơ bước hoạt động như mong muốn, đạt được yêu cầu kỹ thuật và ứng dụng.
Kiểm tra và đánh giá kết quả giúp xác nhận rằng hệ thống hoạt động đúng theo kế hoạch và không gặp phải bất kỳ sự cố nào trong suốt quá trình vận hành.
Ví dụ: Đánh giá hệ thống khi động cơ bước quay trong 24 giờ liên tục mà không gặp sự cố.
Kiểm tra và đánh giá kết quả là bước quan trọng để hoàn thiện quá trình điều khiển động cơ bước, giúp hệ thống hoạt động hiệu quả và ổn định.
Việc lập trình PLC Mitsubishi để điều khiển step motor không chỉ giúp nâng cao hiệu suất và độ chính xác trong các quy trình tự động hóa, mà còn tạo ra những giải pháp linh hoạt cho các ứng dụng công nghiệp hiện đại.

Cách tính trình plc mitsubishi điều khiển step motor
Để tính toán và lập trình PLC Mitsubishi điều khiển động cơ bước (step motor), bạn cần phải hiểu các yếu tố quan trọng liên quan đến hoạt động của động cơ bước và cách mà PLC Mitsubishi điều khiển các thông số này. Dưới đây là một hướng dẫn cơ bản để tính toán và lập trình:
Trước khi bắt đầu tính toán, bạn cần nắm rõ các thông số kỹ thuật của động cơ bước.
Các thông số này sẽ ảnh hưởng đến cách lập trình và tính toán. Một số thông số quan trọng là:
Khi bạn muốn điều khiển động cơ bước quay một góc xác định, bạn cần tính toán số bước cần thiết.
Công thức tính số bước cần thiết:
Ví dụ, nếu bạn muốn động cơ quay 90° và động cơ của bạn có bước góc là 1,8° (tương đương 200 bước/vòng), số bước cần thiết sẽ là:
Để tính toán tốc độ quay của động cơ bước, bạn cần tính số bước trên một đơn vị thời gian (thường là giây). Công thức tính tốc độ quay:
Ví dụ, nếu bạn muốn động cơ quay 90° trong 2 giây, với số bước cần thiết là 50 bước:
Sau khi tính toán các tham số như số bước và tốc độ quay, bạn cần lập trình PLC Mitsubishi để điều khiển động cơ bước theo các tham số này.
Dưới đây là cách tính toán các tham số cần thiết khi lập trình:
Trong lập trình PLC Mitsubishi, bạn có thể sử dụng các bộ đếm (timers/counters) hoặc các lệnh xung để gửi các tín hiệu tới bộ điều khiển động cơ bước.
Giả sử bạn muốn động cơ quay 90° trong 2 giây, bạn đã tính được số bước là 50 và tốc độ là 25 bước/giây. Lập trình PLC Mitsubishi có thể trông như sau:
Bước = 50Tốc độ = 25 bước/giâyTính toán trong lập trình PLC Mitsubishi điều khiển động cơ bước chủ yếu liên quan đến việc tính toán số bước, tốc độ quay và thời gian di chuyển.
Sau khi tính toán các tham số này, bạn sẽ lập trình các tín hiệu đầu ra cho PLC để điều khiển động cơ bước di chuyển chính xác theo các tham số đã tính toán.
Việc hiểu và tính toán chính xác sẽ giúp cho hệ thống hoạt động hiệu quả và chính xác.
( FAQ ) PLC mitsubishi điều khiển step motor
Dưới đây là 19 câu hỏi cà trả lời về PLC mitsubishi điều khiển step motor có thể bạn đang cần:
PLC Mitsubishi điều khiển step motor thông qua việc phát ra các xung điều khiển từ các đầu ra của PLC tới driver của động cơ bước.
Các xung này điều khiển bước quay của động cơ, tạo ra chuyển động chính xác.
Việc phát xung từ PLC giúp điều khiển chính xác chuyển động của step motor trong các ứng dụng tự động hóa.
Lập trình PLC Mitsubishi cho động cơ bước cơ bản bao gồm việc sử dụng các lệnh xung để điều khiển chuyển động, đồng thời điều chỉnh tốc độ và gia tốc của động cơ.
Lập trình cơ bản cho động cơ bước yêu cầu sự kết hợp giữa xung điều khiển và tính toán các tham số tốc độ.
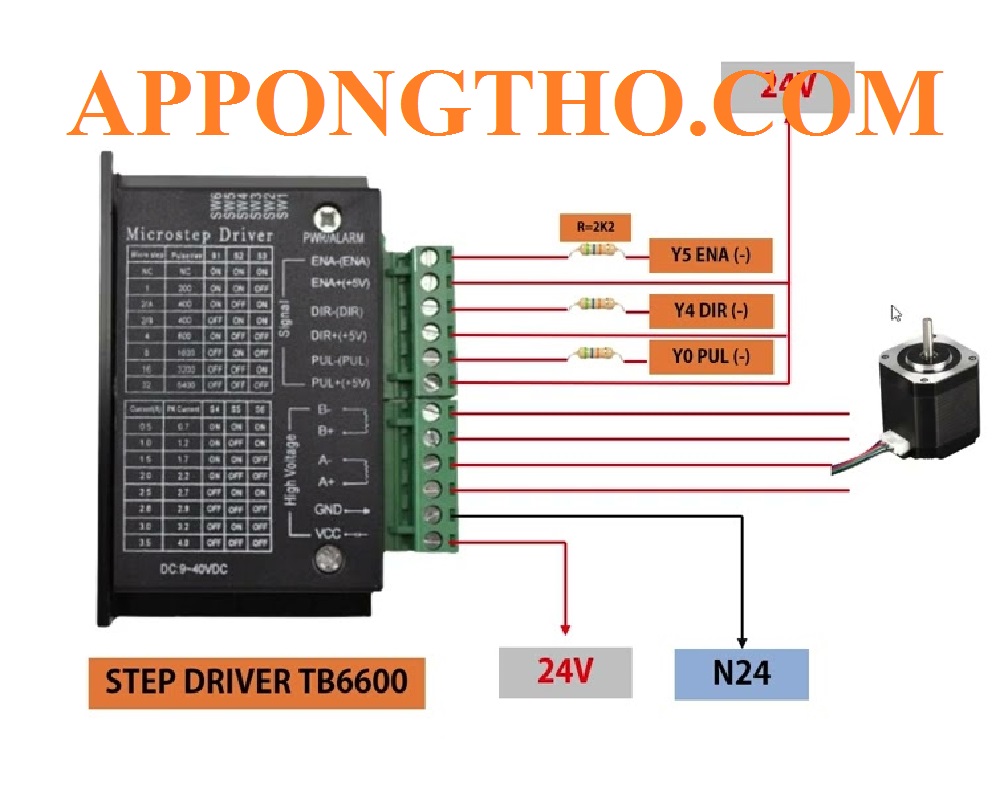
PLC Mitsubishi cung cấp một số lệnh cơ bản như lệnh tạo xung, bộ đếm, và timer để điều khiển động cơ bước.
Những lệnh này giúp điều khiển động cơ bước một cách chính xác và linh hoạt trong các ứng dụng tự động hóa.
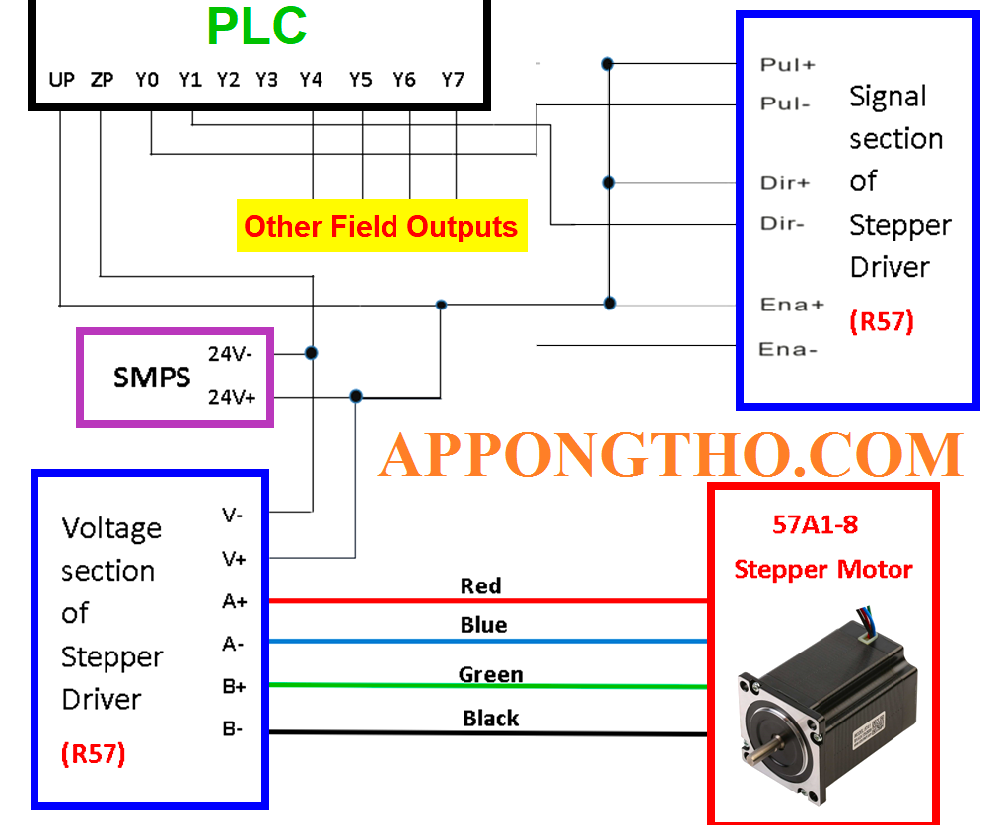
Kết nối PLC Mitsubishi với driver động cơ bước thông qua các tín hiệu đầu ra của PLC, cung cấp các xung điều khiển và tín hiệu điện áp cho driver.
Kết nối này cho phép PLC điều khiển chính xác chuyển động của động cơ bước thông qua tín hiệu xung.
PLC Mitsubishi có thể điều khiển tốc độ và gia tốc của động cơ bước bằng cách thay đổi tần số xung và thời gian giữa các xung.
PLC Mitsubishi cho phép điều khiển linh hoạt tốc độ và gia tốc của động cơ bước, tạo ra chuyển động mượt mà và chính xác.
Số xung cần thiết để quay động cơ bước một góc cụ thể có thể tính bằng cách chia góc quay cho góc quay mỗi bước của động cơ.
Việc tính toán số xung cần thiết giúp đảm bảo động cơ quay đúng với góc cần thiết trong ứng dụng.
Xử lý lỗi khi điều khiển động cơ bước bằng PLC Mitsubishi yêu cầu giám sát các tín hiệu và trạng thái của hệ thống để phát hiện các sự cố như mất tín hiệu xung hoặc quá tải.
Việc giám sát chặt chẽ và phát hiện lỗi kịp thời giúp duy trì hoạt động ổn định của hệ thống điều khiển động cơ bước.
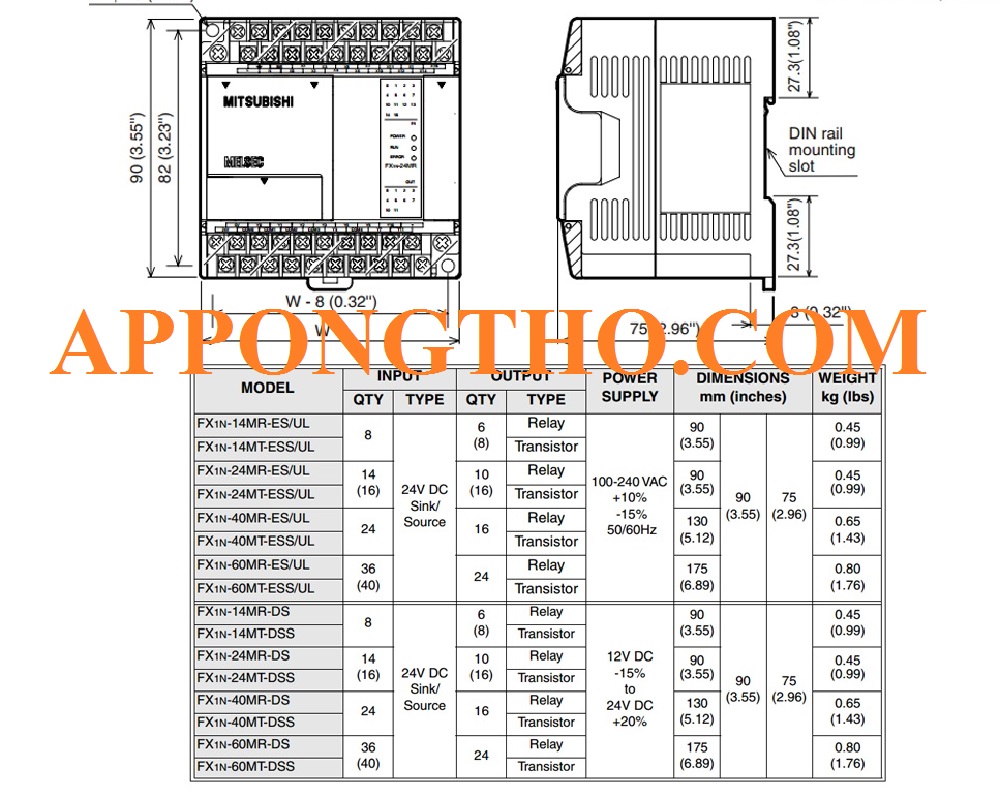
Các PLC Mitsubishi như FX, Q, và iQ-R series rất phù hợp cho việc điều khiển động cơ bước nhờ vào khả năng lập trình linh hoạt và các chức năng hỗ trợ xung điều khiển.
Các PLC Mitsubishi này đều cung cấp các tính năng mạnh mẽ để điều khiển động cơ bước với hiệu suất cao.
Các phương pháp điều khiển động cơ bước bằng PLC bao gồm điều khiển xung trực tiếp, điều khiển PWM, và điều khiển thông qua bộ điều khiển bên ngoài.
Mỗi phương pháp có ưu điểm riêng và lựa chọn phương pháp phù hợp giúp tối ưu hiệu suất điều khiển động cơ bước.

Lập Trình PLC Mitsubishi Điều Khiển Step Motor Đầy Đủ Nhất
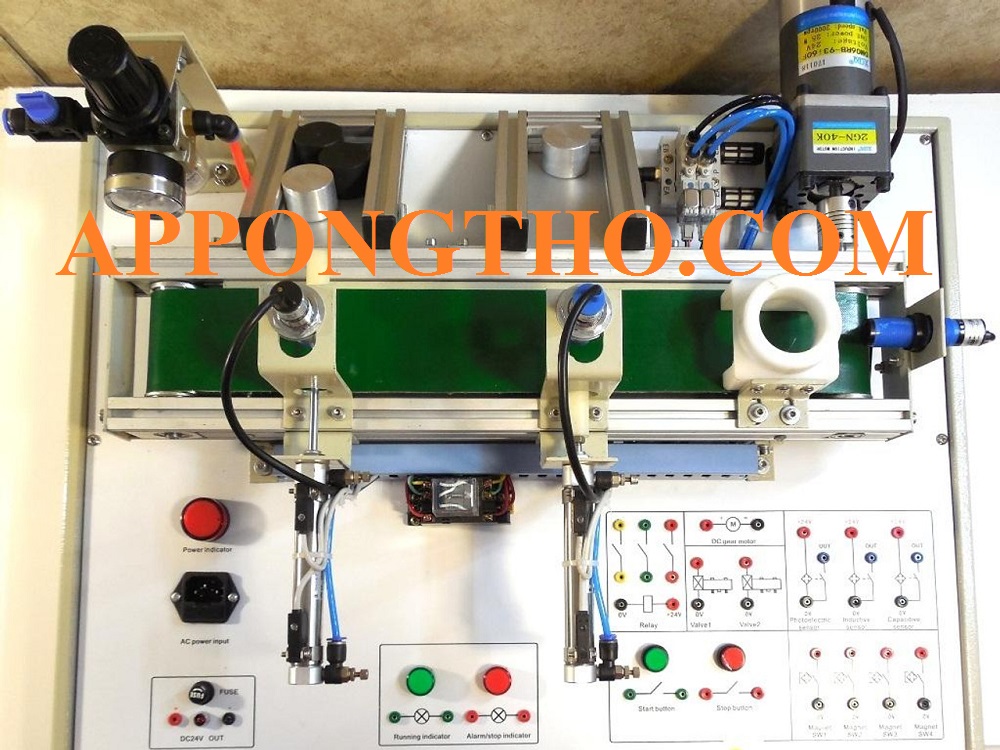
PLC Mitsubishi được sử dụng trong nhiều ứng dụng thực tế như điều khiển các trục máy CNC, robot công nghiệp, và các hệ thống băng tải tự động.
PLC Mitsubishi là lựa chọn phổ biến trong các ngành công nghiệp nhờ vào khả năng điều khiển chính xác động cơ bước cho nhiều ứng dụng.
Xây dựng hệ thống điều khiển động cơ bước đơn giản bao gồm việc lập trình PLC để điều khiển các xung, kết nối với driver và cài đặt các tham số cần thiết.
Hệ thống điều khiển đơn giản có thể được xây dựng bằng PLC Mitsubishi với các bước cài đặt và lập trình cơ bản.
Độ chính xác khi điều khiển động cơ bước phụ thuộc vào các yếu tố như số bước góc, tần số xung, độ ổn định của tín hiệu và khả năng của driver.
Độ chính xác của hệ thống phụ thuộc vào việc điều chỉnh và tối ưu các yếu tố này trong quá trình lập trình và vận hành.
Để giảm rung động khi điều khiển động cơ bước, bạn có thể sử dụng các kỹ thuật như điều chỉnh tốc độ, gia tốc và sử dụng driver có chức năng giảm rung.
Việc điều chỉnh các tham số điều khiển và sử dụng thiết bị phù hợp giúp giảm rung động khi động cơ bước hoạt động.
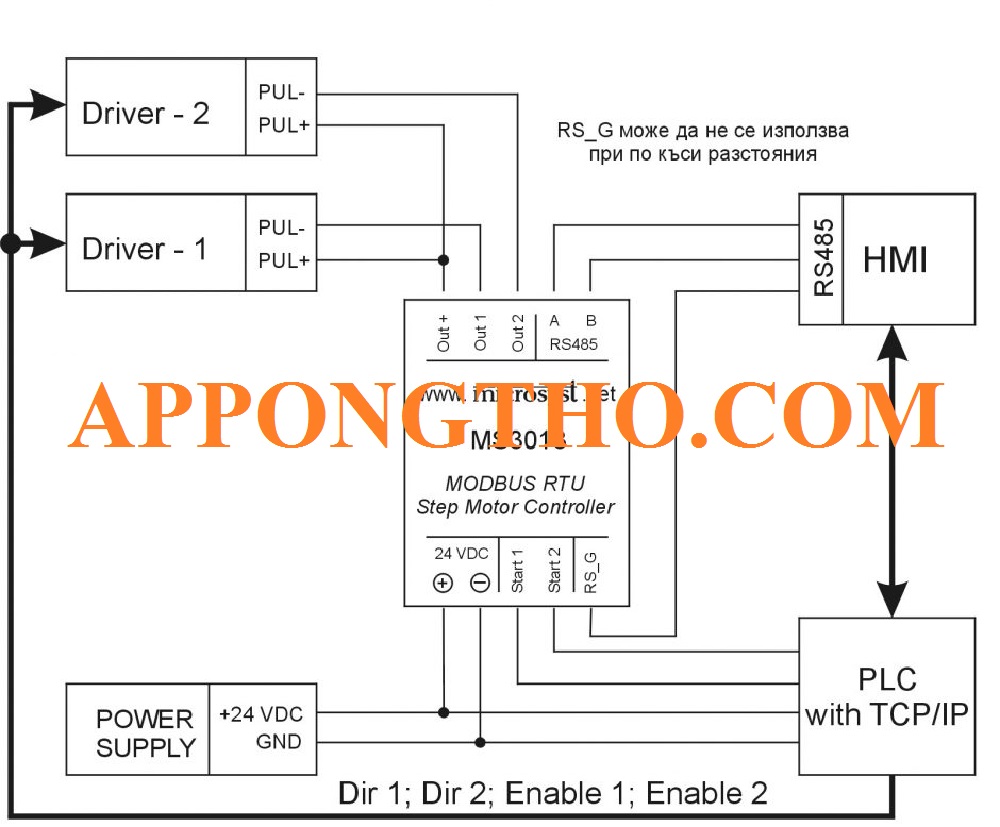
Điều khiển nhiều động cơ bước đồng thời yêu cầu sử dụng nhiều đầu ra của PLC và lập trình để đồng bộ hóa các tín hiệu xung cho các động cơ.
Điều khiển nhiều động cơ bước đồng thời có thể thực hiện được với sự đồng bộ hóa chính xác các tín hiệu xung.
Tích hợp PLC Mitsubishi với HMI cho phép người vận hành dễ dàng điều khiển và giám sát quá trình điều khiển động cơ bước thông qua giao diện người dùng.
Tích hợp PLC với HMI giúp cải thiện khả năng điều khiển và giám sát hệ thống một cách trực quan và dễ dàng.
Bảo trì hệ thống điều khiển động cơ bước bao gồm việc kiểm tra kết nối, vệ sinh động cơ, và thay thế các linh kiện khi cần thiết.
Bảo trì và bảo dưỡng định kỳ giúp hệ thống điều khiển động cơ bước hoạt động hiệu quả và bền bỉ.
Các dự án mẫu thường bao gồm việc điều khiển robot, máy đóng gói tự động, và hệ thống kiểm tra vị trí trong dây chuyền sản xuất.
Các dự án này thể hiện khả năng của PLC Mitsubishi trong việc điều khiển động cơ bước cho các ứng dụng công nghiệp.
Bạn có thể học về điều khiển động cơ bước bằng PLC Mitsubishi thông qua các khóa học trực tuyến, tài liệu từ Mitsubishi, hoặc tham gia các khóa đào tạo chuyên sâu.
Nhiều nguồn tài liệu và khóa học có sẵn giúp bạn hiểu rõ về cách điều khiển động cơ bước bằng PLC Mitsubishi.
Bạn có thể mua PLC Mitsubishi và các thiết bị liên quan từ các nhà phân phối chính hãng hoặc các cửa hàng trực tuyến uy tín.
Việc mua thiết bị từ các nhà phân phối chính hãng giúp đảm bảo chất lượng và dịch vụ hỗ trợ tốt nhất.
Nhờ vào tính năng dễ dàng lập trình và cấu hình của PLC Mitsubishi, các kỹ sư và nhà sản xuất có thể tùy chỉnh hệ thống điều khiển theo nhu cầu cụ thể của từng dây chuyền sản xuất.
Bằng cách áp dụng các kiến thức về lập trình PLC và động cơ bước, doanh nghiệp có thể tiết kiệm chi phí vận hành và nâng cao chất lượng sản phẩm.
Hy vọng rằng bài viết này đã cung cấp cho bạn những thông tin hữu ích, giúp bạn hiểu rõ hơn về cách thức áp dụng PLC Mitsubishi trong việc điều khiển step motor cho các hệ thống tự động hóa công nghiệp.



